
Ultrasonic sensors in rviz
Ultrasonic Sensors on the Arduino
The primary sensor on my robot will be a kinect. Playing around with the kinect on my laptop, it's apparent that the depth sensor doesn't work below ~20 cm. It was designed to track people standing a few meters away, and the depth image is black for pixels containing very nearby object(s).
In order to prevent the robot from smashing into things that are nearby, I plan on using an array of ultrasonic sensors as a "virtual bumper", so that while I'm debugging and developing control/navigation, the robot doesn't destroy itself by crashing into everything. There are currently 4 sensors hotglued to the robot base: 1 forward-facing, 1 backward-facing, and 1 each to the forward-left and forward-right (about 30 degrees off-center).
The sensors require a microcontroller to use. It's possible to use the pins on the pi to drive and read from the sensors. However, 1) the input pins on the pi take 3.3V input, which means you have to step down from 5V, which is a pain for multiple channels; and 2) interrupts from the OS could make it unreliable. When timing the speed of a ping down to the microsecond, the pi may be busy with more heavy-duty computer vision computation, and low latency ultrasonic readings are safety-critical for the robot, so I'm dedicating an arduino to it. The firmware for driving a set of sensors with the arduino uno is here. There is an associated ROS node, ultrasonc_array, that reads from the serial port, parses the lines, and broacasts the readings as ROS Range messages. This node also defines the transform (tf) of each of the pins; in this way an identity ("front_right_sensor", "rear_center_sensor", etc.) is assigned to the pin numbers that are read from the serial port.
Note that even after the primary echo is detected by the sensor and printed on the serial port by the Arduino, there may still be reverberations and echos from the ping. You need to wait 150-200ms after a reading before sending the next ping so that there's no interference from the previous ping.
Robot Description in URDF
The frames assigned by ultrasonic_array are just strings. In order to define the geometry, I created a package for describing the robot's geometry and wrote a URDF description of the robot by following the ROS tutorial. A few of the components were too complicated to draw manually, so I specified them as 3D models created in Sketchup. There's no Sketchup for Ubuntu (my laptop OS), but it runs fine with PlayOnLinux. From Sketchup, export the 3D models as .dae files, which can be included in the URDF.
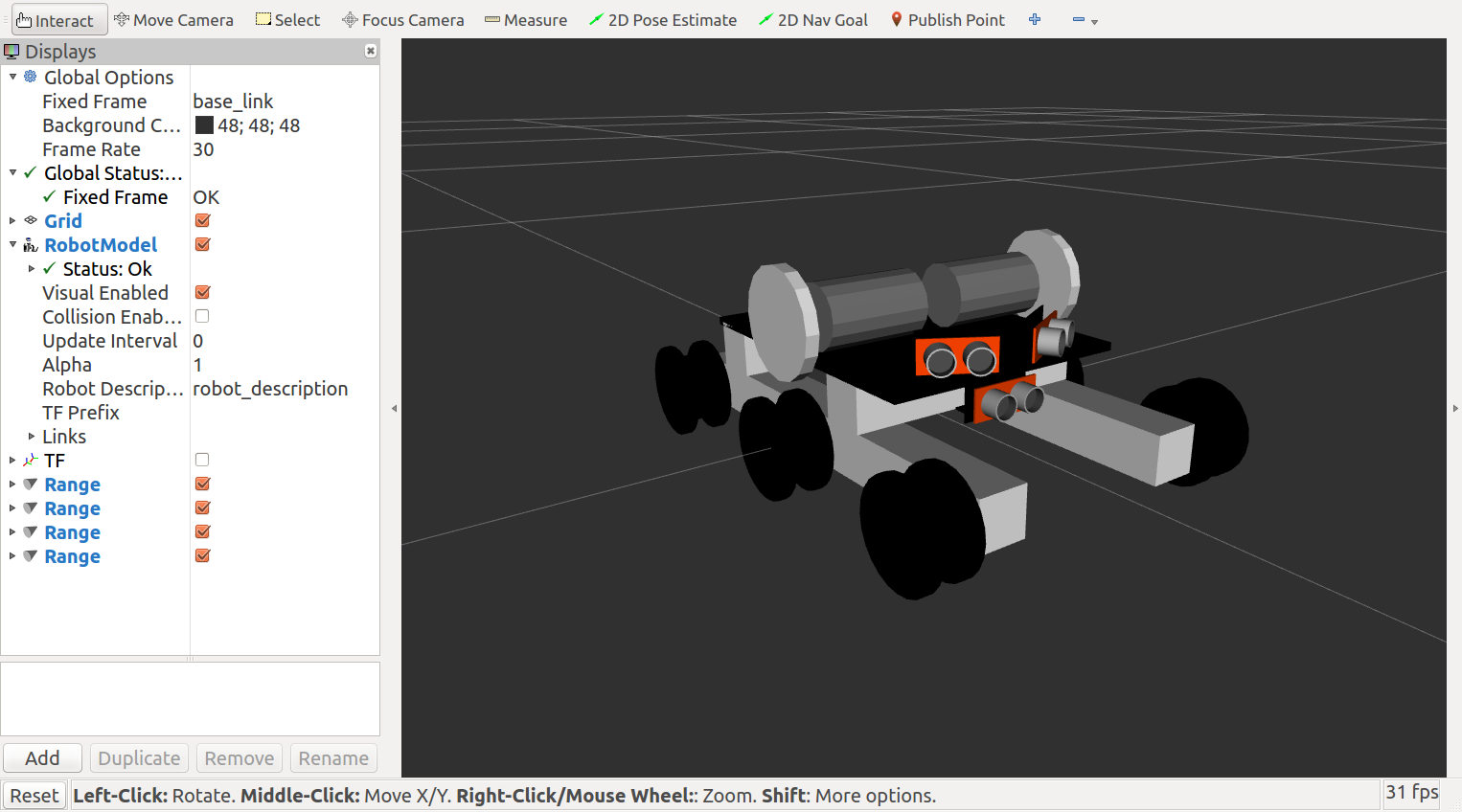
While working on the URDF, you can view the model with rviz with the command roslaunch adam_description display.launch. The launch file uses joint_state_publisher and robot_state_publisher to publish the poses of all the robot components (including the sensors), and launches rviz to view it. My half-finished model looks like this:
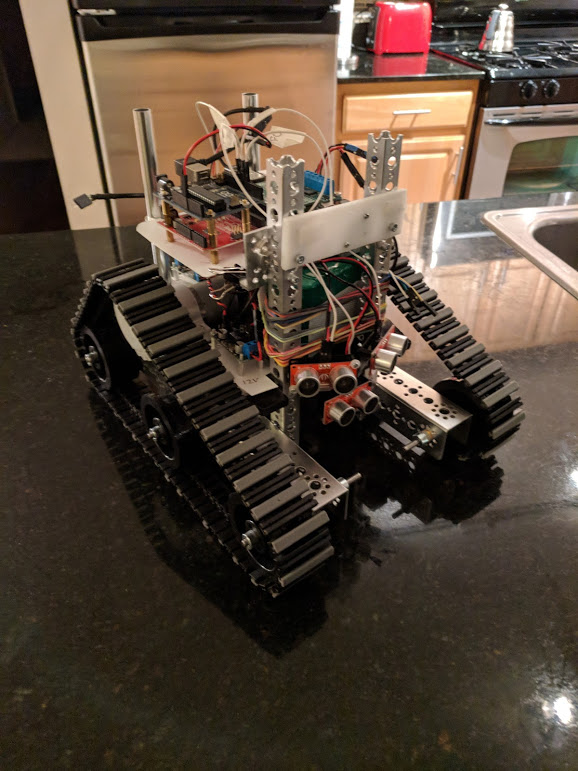
The actual robot has tank treads and is more complete than the model:
Real-time rendering of Range measurements
Putting it all together, define the robot in URDF, broadcast the robot geometry and view it with roslaunch adam_description display.launch. Then start the ultrasonic array node with rosrun ultrasonic_array ultrasonic_array to begin reading the arduino printouts and broadcasting the Range messages. From in the Rviz GUI, manually add the Range measurements. In order for the Range messages to display correctly, the frame defined in the ultrasonic_array must match one of the frames in the URDF description. The result:
The Range measurements are displayed as cones which indicate the field of view of the sensor. There's a half second lag, partly due to the wifi -- the visualization node runs on my laptop, but the other nodes are running on the raspberry pi.